-
Greedy Choice
-
Idea:
- Local optimal choice at each step can yield a globally optimal solution
-
-
Difference btw Greedy and DP
Greedy Dynamic Programming Chioce Make choice before solving subproblem Solve subproblem before making any choice Approach Top-Down Bottom-Up -
Optimal Substructure
- A problem exihibits optimal substructure if an optimal solution to the problem contains within it has optimal solutions to subproblem.
The general idea:
- Set left and right, compute mid
- Find the target with mid, adjust left and right boundaries coordinately.
Questions:
- When to use
left < rightand when to useleft <= right?
When left <= right ?
- When we are lazy and want to finish valid return inside the while loop
- When there's only one element in the array and it is the target, we want the index return within the while loop, and not falls to return -1
- See 704
When left < right ?
- In this case, the loop breaks at left == right, and the left/right may be the target we are looking for, so we have to do extra work to check whether the left/right is the target, and return index if found.
- See 278
- What are some pitfalls would cause infinite loop?
- After we ensure the midpoint is not the target, we did not move away from midpoint. E.g., left = mid, right = mid are incorrect. Consider the situation [-1,0,3,5,9], target = 2, we have no problem to shrink the range to [-1,0], but since the target cannot be found, and the target is greater than mid, we would assign right = mid again and again. However, if we use right = mid-1 instead, left, right and mid are all pointing to the first element, we can break from the loop after next condition check which makes the right < left, and return -1 by default.
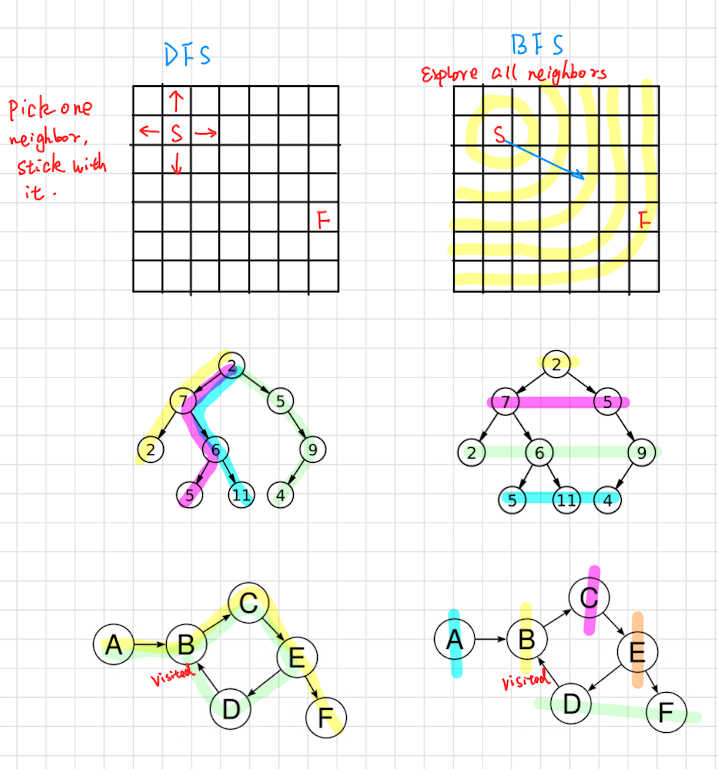
If a node has neighbors, arbitrarily pick one of those and go there unless we’ve already seen that node.
DFS(graph, start_node, end_node):
frontier = new Stack()
frontier.push(start_node)
explored = new Set()
while frontier is not empty:
current_node = frontier.pop()
if current_node in explored: continue
if current_node == end_node: return success
for neighbor in graph.get_neigbhors(current_node):
frontier.push(neighbor)
explored.add(current_node)
Explore all the neighbors of our starting node before exploring any other node.
BFS(graph, start_node, end_node):
frontier = new Queue()
frontier.enqueue(start_node)
explored = new Set()
while frontier is not empty:
current_node = frontier.dequeue()
if current_node in explored: continue
if current_node == end_node: return success
for neighbor in graph.get_neigbhors(current_node):
frontier.enqueue(neighbor)
explored.add(current_node)